HITBOT ELEKTRISCH GREIFFER SERIE – Z-EFG-20 Parallel Elektresch Gräifer


Haaptkategorie
Industriellen Roboterarm / Kollaborativen Roboterarm / Elektresche Grëffer / Intelligenten Aktuator / Automatiséierungsléisungen
Applikatioun
D'Robotergräifer vun der SCIC Z-EFG Serie si kleng a mat engem agebaute Servosystem, wat et erméiglecht, eng präzis Kontroll vu Geschwindegkeet, Positioun a Spannkraaft z'erreechen. Dat modernt Gräifsystem vu SCIC fir Automatiséierungsléisungen erméiglecht Iech nei Méiglechkeeten fir d'Automatiséierung vun Aufgaben, déi Dir ni fir méiglech gehalen hutt.

Fonktioun

· Agebaute Controller
· Verstellbar Schlag- a Grëffkraaft
· D'Enn kann ersat ginn, fir sech un ënnerschiddlech Bedierfnesser unzepassen
· Huelt fragil an deforméierbar Objeten op, wéi z.B. Eeër,Reagenzglieser, Réng, etc.
·Benotzt Szenen ouni Loftquell (z.B. Laboratoire, Spidol)
Genauegkeet fir d'Kontroll, fir a klenge Raim ze spannen, séier a stabil ze spannen
Grouss Spannkraaft
De Gesamtschlag ass 20 mm, d'Spannkraaft ass 80 N.
Genauegkeet fir d'Kontroll
Widderhuelbarkeet: ±0,02 mm
Laang Liewensdauer
Zéng Millioune Zyklen, iwwer de Loftgriffer eraus
Controller ass agebaut
Kleng Plaz besetzend, praktesch ze integréieren.
Kontrollmodus
Puls, I/O-Controller als Optioun
Weich Klemmen
Et kann fragil Objeten festklemmen




Spezifikatiounsparameter
| Modell Nr. Z-EFG-20 | Parameteren |
| Total Schlaganfall | 20mm |
| Grëffkraaft | 30~80N |
| Widderhuelbarkeet | ±0,02 mm |
| Recommandéiert Grëffgewiicht | 0,8 kg |
| Transmissioun Modus | Zännradgestänge + Kräizrollenféierung |
| Fettopfëllung vu bewegende Komponenten | All sechs Méint oder 1 Millioun Beweegungen / Zäit |
| Beweegungszäit vun engem eenzege Schlag | 0,45 Sekonnen |
| Betribstemperaturberäich | 5-55℃ |
| Betribsfiichtegkeetsberäich | RH35-80(Kee Frascht) |
| Bewegungsmodus | Zwee Fanger beweege sech horizontal |
| Schlagkontroll | Verstellbar |
| Astellung vun der Spannkraaft | Verstellbar |
| Gewiicht | 0,458 kg |
| Dimensiounen(L*B*H) | 44*30*124,7 mm |
| Placement vum Controller | Agebaut |
| Kraaft | 5W |
| Motortyp | Gläichstroum ouni Bürsten |
| Spëtzestroum | 1A |
| Nennspannung | 24V |
| Standby-Stroum | 0,2A |
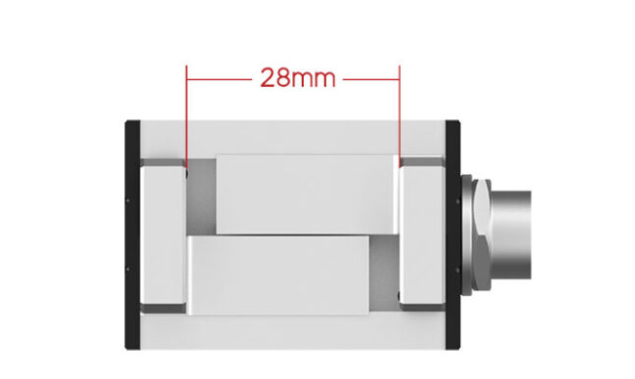
| Schlagfest / vibratiounsbeständeg | 98 m/s |
| Motorduerchmiesser | 28mm |
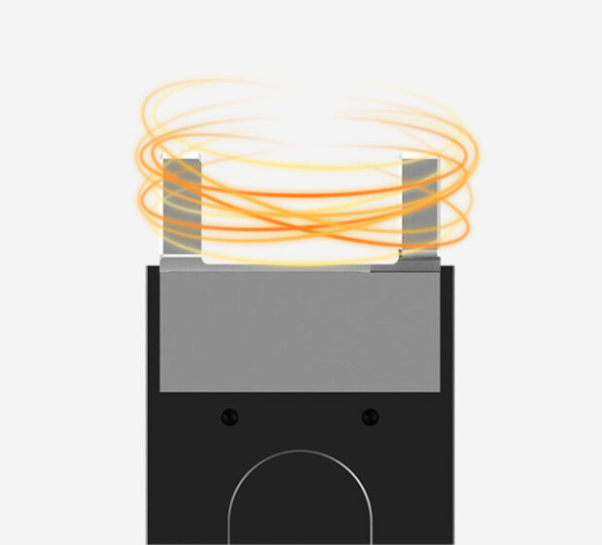
* Z-EFG-20 Grëffkraaft: D'Grëffkraaft kann ugepasst ginn andeems e kontrolléiert Deformatiounsmaterial op d'Front vun der Befestigung bäigefüügt gëtt, wat no der entspriechender Deformatiouns- a Kraaftkurve kritt gëtt.
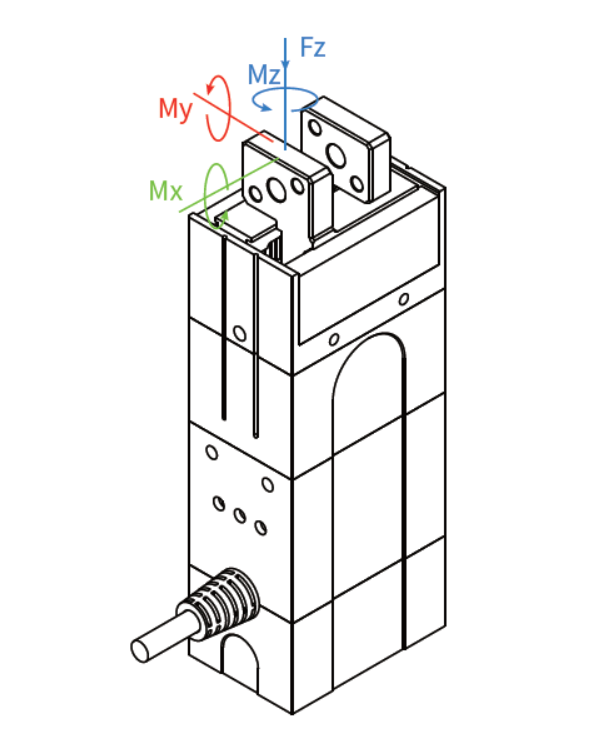
| Zulässlech statesch Belaaschtung a vertikaler Richtung | |
| Fz: | 150N |
| Zulässegt Dréimoment | |
| Mx: | 2,1 Nm |
| Mäin: | 2,34 Nm |
| Mz: | 2 Nm |
Grouss Spannkraaft, Genauegkeetskraaftkontroll

De elektresche Grëffer benotzt e speziellen Transmissiounsdesign an eng Fuerberechnungskompensatioun, seng Spannkraaft ass 80N kontinuéierlech justierbar, de Gesamtschlag ass 20 mm, seng Widderhuelbarkeet ass ± 0,02 mm.
Bewegungsmodus a Schlag justierbar
D'Bewegung vum elektresche Grëff gehéiert zu enger paralleler Bewegung mat zwee Fanger, seng kierzt Zäit vun engem eenzege Schlag ass just 0,45 Sekonnen, an d'Spanngewiicht ≤0,8 kg, sou datt e d'Ufuerderunge vun enger stabiler Spannung fir d'Produktiounslinn erfëllt.
Kompakt Struktur, flexibel ze installéieren.

D'Gréisst vum Z-EFG-20 ass L40*B30*H124,7 mm, seng Struktur ass kompakt, ënnerstëtzt méi wéi fënnef Installatiounsmodi, säi Controller ass agebaut, hëlt klenge Plaz an, sou datt verschidden Klemmaufgaben einfach ausgefouert kënne ginn.


Integréiert Undriff a Controller, mëll Spannung

Den Schwanz vum Z-EFG-20 kann einfach geännert ginn, d'Clienten kënnen hir Ufroobjeten spannen, den Schwanz designen an de elektresche Grëffer behalen, fir d'Spannaufgaben maximal auszeféieren.
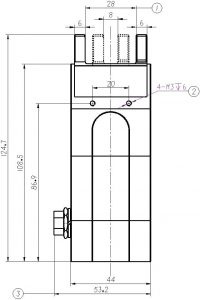
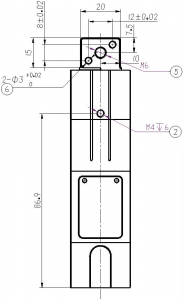
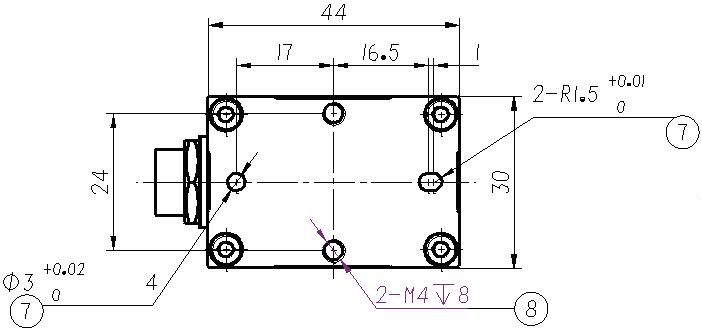
Dimensiounsinstallatiounsdiagramm
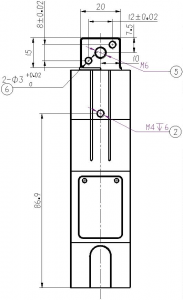
① Bewegungsschlag vun de Grëfffanger
② Säitlech Montagepositioun (Gewindelach)
③ Verkabelung vun der Loftfaartsteckdous
④ Positioun vun der Grëffkraaftjustéierung (lénks) an der Indikatorluucht (riets)
⑤ Montagepositioun vum Grëff (Gewindelach)
⑥ Montagepositioun vum Grëff (Lach vum Stift)
⑦ Ënnescht Montagepositioun (Stiftlach)
⑧ Ënnescht Montagepositioun ((Gewënnlach)
Eis Entreprise


Produktkategorien
-

HITBOT ELEKTRISCH GRÉIFSERIE – Z-EFG-C5...
-

DH ROBOTICS SERVO ELEKTRISCH GREIFFER PGE SERIE –...
-

DH ROBOTICS SERVO ELEKTRISCH GRËIFER RGI SERIE –...
-

DH ROBOTICS SERVO ELEKTRISCH GRËIFER RGI SERIE –...
-

DH ROBOTICS SERVO ELEKTRISCH GRËIFER RGI SERIE –...
-

DH ROBOTICS SERVO ELEKTRISCH GRËIFER PGC SERIE –...