HITBOT ELEKTRISCH GREIFFER SERIE – Z-ERG-20 Rotéierend Elektresch Gräifer




Haaptkategorie
Industriellen Roboterarm / Kollaborativen Roboterarm / Elektresche Grëffer / Intelligenten Aktuator / Automatiséierungsléisungen
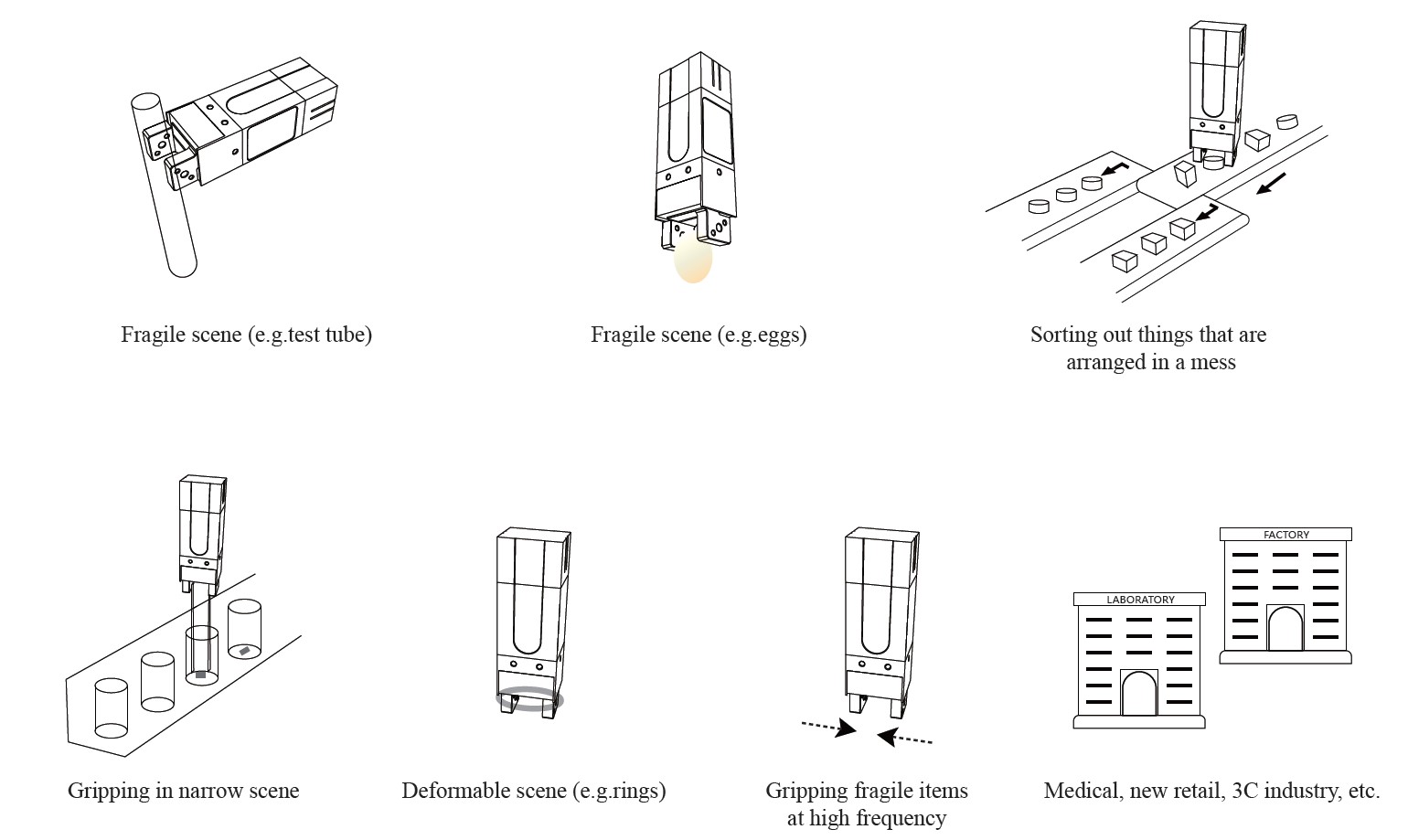
Applikatioun
D'Robotergräifer vun der SCIC Z-Serie si kleng a mat engem agebaute Servosystem, wat et erméiglecht, eng präzis Kontroll vu Geschwindegkeet, Positioun a Spannkraaft z'erreechen. Dat modernt Gräifsystem vu SCIC fir Automatiséierungsléisungen erméiglecht Iech nei Méiglechkeeten fir d'Automatiséierung vun Aufgaben, déi Dir ni fir méiglech gehalen hutt.
Fonktioun

· Ënnerstëtzung vun onendlecher Rotatioun a relativer Rotatioun, kee Schleifring, niddreg Ënnerhaltskäschten
· Rotatioun a Grëffkraaft, Positioun a Geschwindegkeet kënne präzis kontrolléiert ginn
· Laang Liewensdauer, méi Zyklen, besser Leeschtung wéi prenumatesche Grëffer
· Agebaute Controller: kleng Plaz an einfach ze integréieren
· Kontrollmodus: Ënnerstëtzung vum Modbus Bus Kontroll an I/O



Spezifikatiounsparameter
De Manipulator Z-ERG-20 ass einfach mat Leit ze schaffen an ënnerstëtzt mëll Grëff. De elektresche Grëffer ass héich integréiert an huet vill Virdeeler:
●Ënnerstëtzung vun onendlecher Rotatioun a relativer Rotatioun, kee Schläifring, niddreg Ënnerhaltskäschten.
●Rotatioun, Spannkraaft, Buer a Geschwindegkeet kënne präzis kontrolléiert ginn.
●Laang Liewensdauer: Zénger vu Millioune Kreesser, besser wéi Loftkompressoren.
●Agebaute Controller, fir Plaz ze spueren, einfach ze integréieren.
●Kontrollmodus: Ënnerstëtzung fir Modbus an I/O-Kontroll.
| Modell Nr. Z-ERG-20 | Parameteren |
| Gesamtschlag | 20mm justierbar |
| Grëffkraaft | 10-35N justierbar |
| Widderhuelbarkeet | ±0,2 mm |
| Recommandéiert Grëffgewiicht | ≤0,4 kg |
| Transmissiounsmodus | Zännrad + Linearféierung |
| Fettopfëllung vu bewegende Komponenten | All sechs Méint oder 1 Millioun Beweegungen / Zäit |
| Beweegungszäit vun engem eenzege Schlag | 0,20 Sekonnen |
| Rotéierend maximalt Dréimoment | 0,3 Nm |
| Rotatiounsgeschwindegkeet maximal | 240 U/min |
| Rotatiounsberäich | Onendlech Rotatioun |
| Rotéierend Réckspill | ±1° |
| Gewiicht | 1,0 kg |
| Dimensiounen | 54*54*141mm |
| Betribsspannung | 24V±10% |
| Bewäertungsstroum | 1,5A |
| Maximalen Stroum | 3A |
| Kraaft | 50W |
| Schutzklass | IP20 |
| Motortyp | Servomotor |
| Betribstemperaturberäich | 5-55℃ |
| Betribsfiichtegkeetsberäich | RH35-80 (Kee Frascht) |
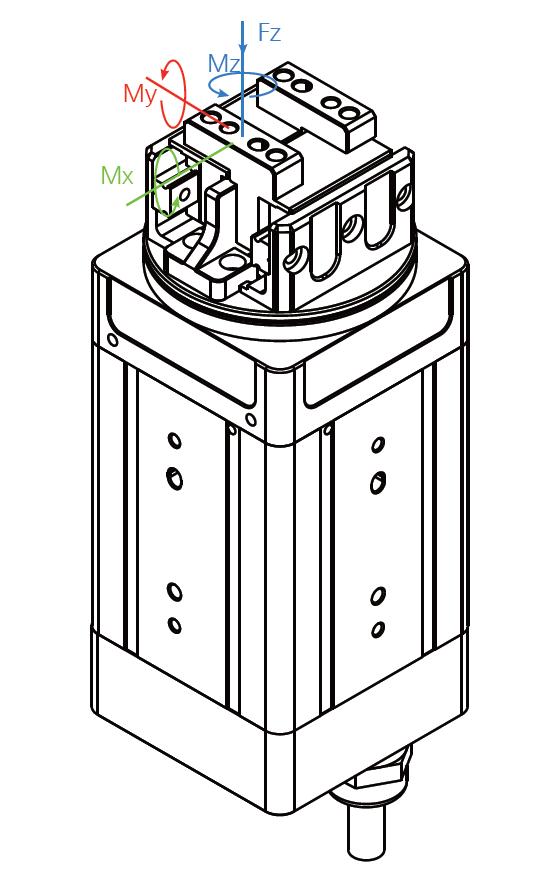
| Zulässlech statesch Belaaschtung a vertikaler Richtung | |
| Fz: | 100N |
| Zulässegt Dréimoment | |
| Mx: | 1,35 Nm |
| Mäin: | 0,8 Nm |
| Mz: | 0,8 Nm |
Schwéierpunktsoffset vun der Last
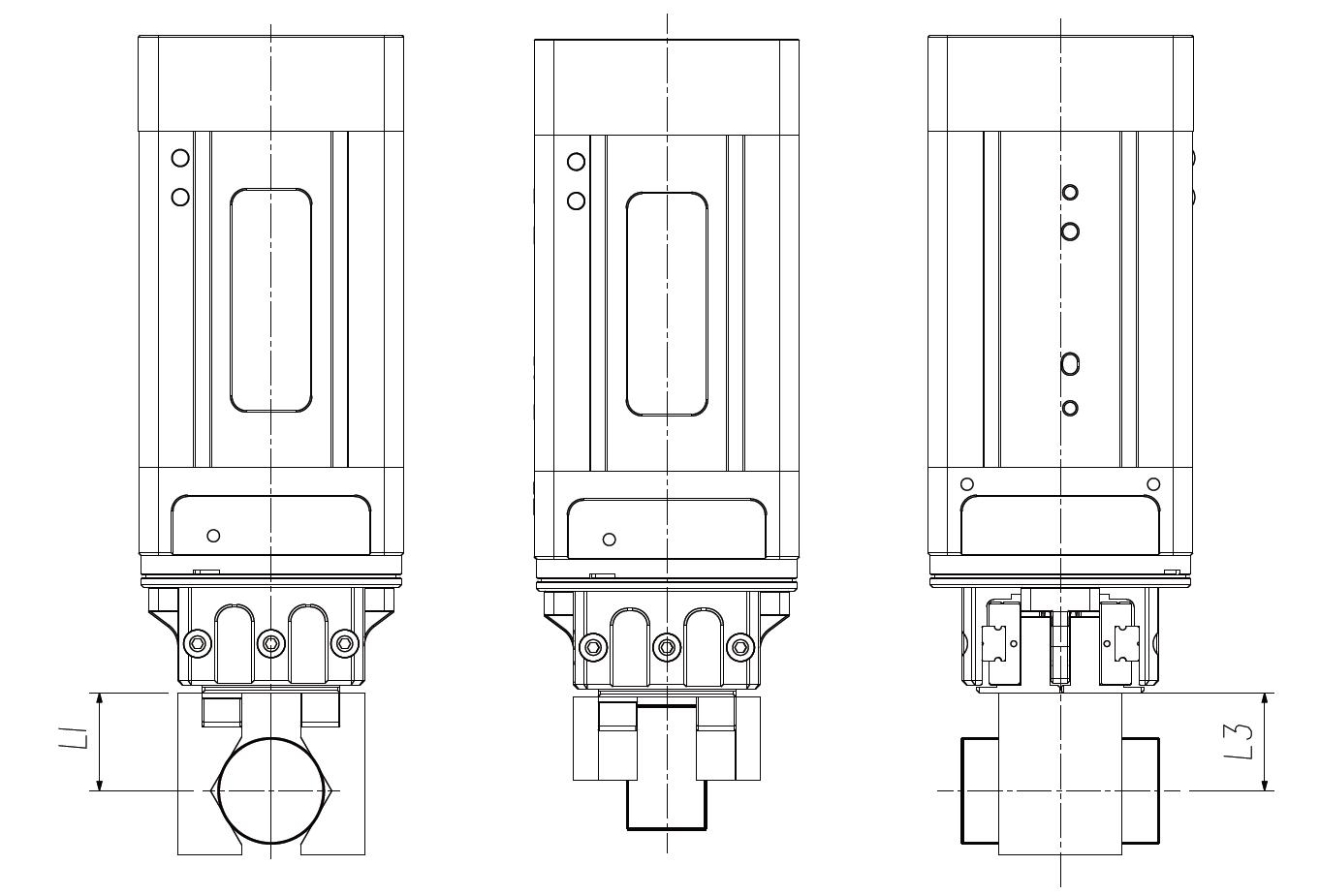
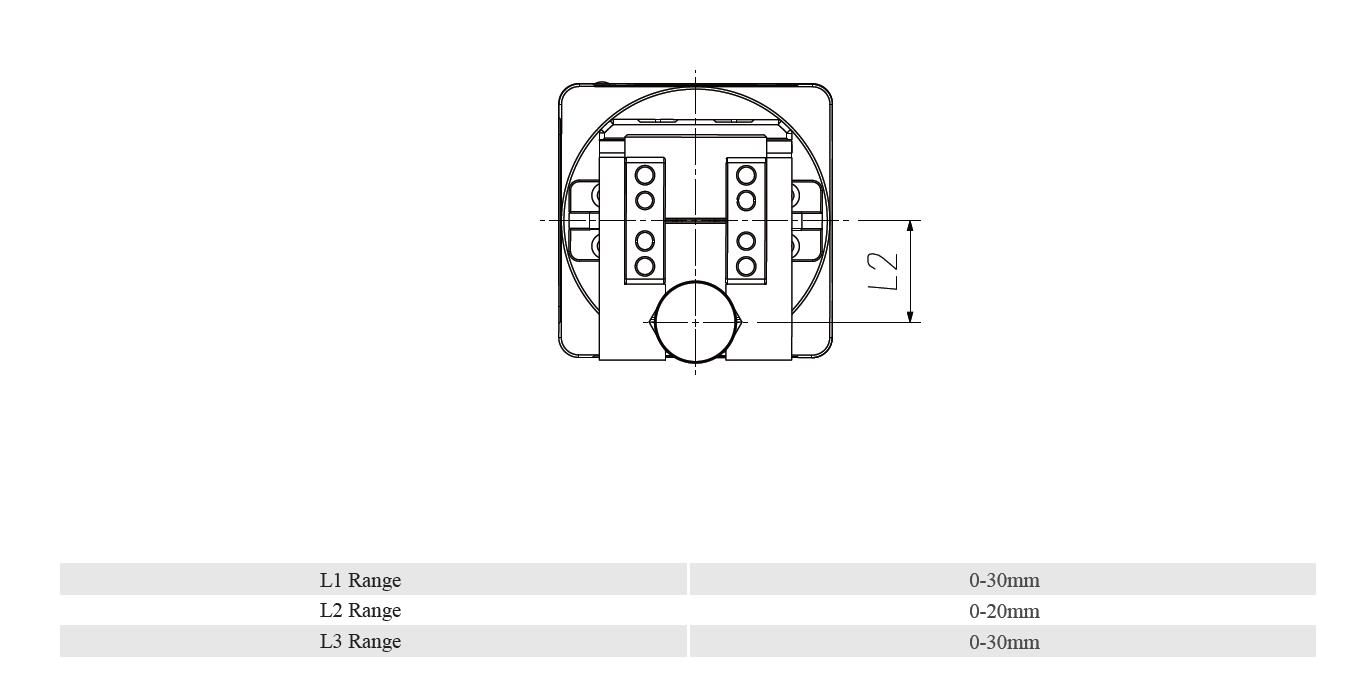
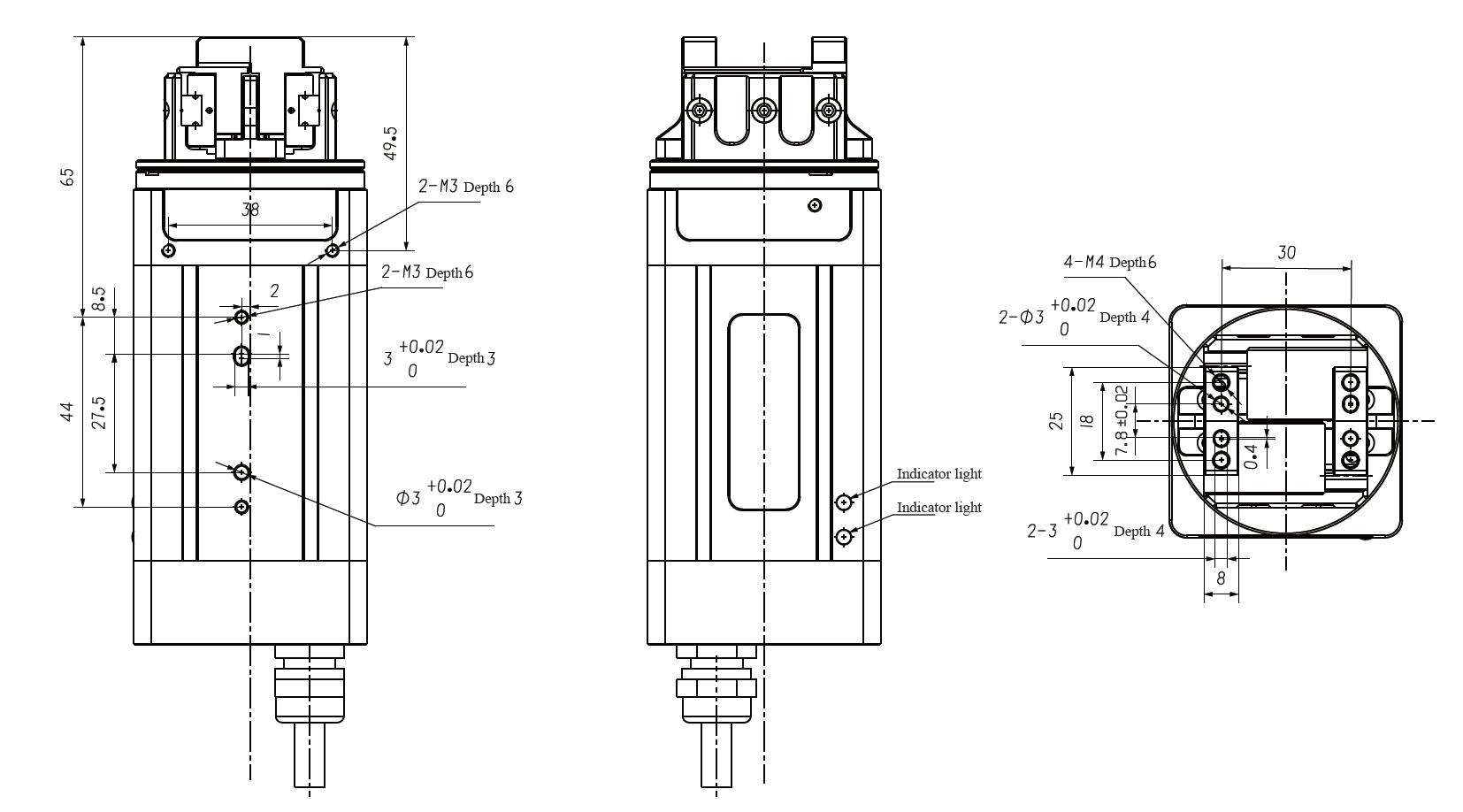
Dimensiounsinstallatiounsdiagramm
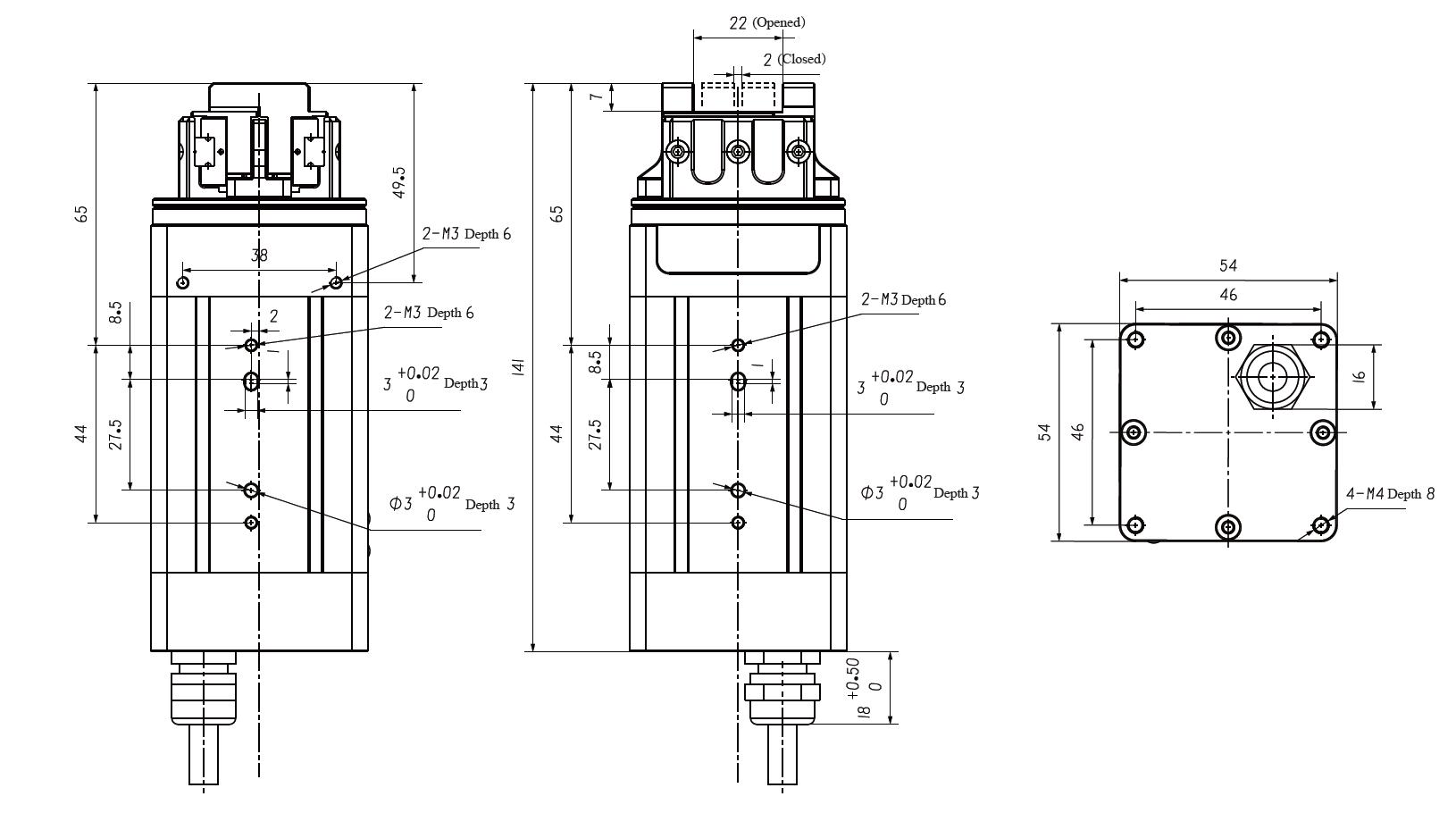
① RKMV8-354 Fënnef-Kär Loftfaartstecker op RKMV8-354
② De Schlag vum elektresche Grëffer ass 20 mm
③ Installatiounspositioun, benotzt zwou M6 Schrauwen fir mam Flansch um Enn vum UR Roboterarm ze verbannen
④ Montagepositioun, Montagepositioun vun der Befestigung (M6 Schrauf)
⑤ Montagepositioun, Montagepositioun vun der Befestigung (3 zylindresch Stiftlächer)
Eis Entreprise







