SCARA ROBOTESCH ÄERM – Z-Arm-4160B Kollaborativen Roboterarm





Haaptkategorie
Industriellen Roboterarm / Kollaborativen Roboterarm / Elektresche Grëffer / Intelligenten Aktuator / Automatiséierungsléisungen
Applikatioun
SCIC Z-Arm Cobots si liicht 4-Achs kollaborativ Roboter mat agebautem Undriffsmotor, a brauchen keng Reduzéierer méi wéi aner traditionell Scara, wat d'Käschten ëm 40% reduzéiert. SCIC Z-Arm Cobots kënnen Funktiounen ëmsetzen, dorënner, awer net limitéiert op, 3D-Dréck, Materialbehandlung, Schweessen a Lasergravéierung. Si kënnen d'Effizienz an d'Flexibilitéit vun Ärer Aarbecht a Produktioun däitlech verbesseren.
Fonctiounen

Héich Präzisioun
Widderhuelbarkeet
±0,02 mm
Personnaliséiert Z-Achs
0,1-0,8 m
Grouss Notzlaascht
Stand 4kg
Maximal 5 kg
Méi héich Geschwindegkeet
Maximal linear Geschwindegkeet 2m/s
(Standbelaaschtung 5 kg)
Grouss Aarmspann, héichgenauegen 4-Achsen Roboterarm mat einfacher Benotzung
Héich Präzisioun
Widderhuelbarkeet: ±0,02 mm
Grouss Aarmspann
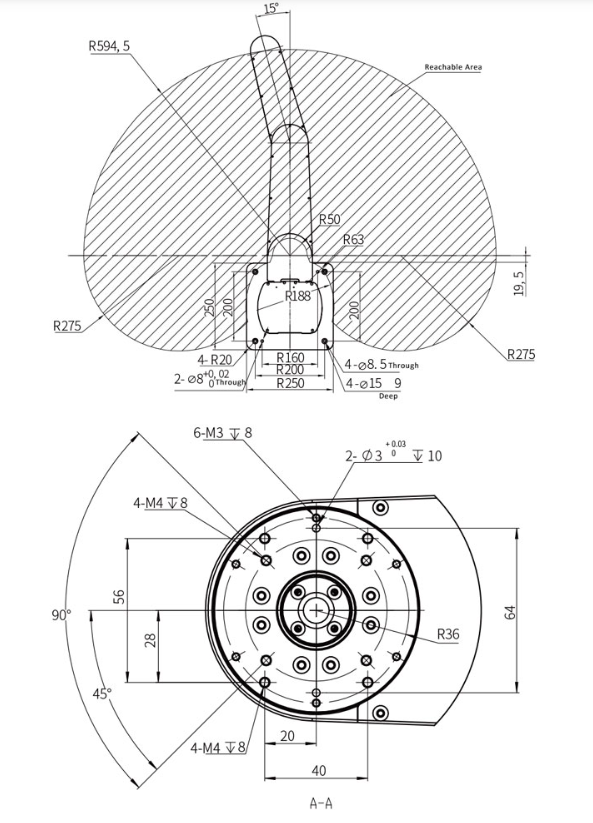
J1-Achs: 325mm,J2-Achs: 275mm
Personnaliséiert Z-Achs
Den Op- an Ofwärtsschlag kann tëscht 0,1 m an 0,8 m personaliséiert ginn
Platzsparend
Undriff/Controller ass agebaut
Einfach an einfach ze benotzen
Den Ufänger, deen de Roboterarm net kannt huet, kann och einfach ze benotzen sinn, d'Interface geet op.
Héich Geschwindegkeet
Seng Geschwindegkeet ass 2000 mm/s ënner enger Belaaschtung vu 4 kg

Verwandte Produkter



Spezifikatiounsparameter
Den SCIC Hitbot Z-Arm 4160B gouf vu SCIC Tech entwéckelt, et ass e liichte kollaborative Roboter, einfach ze programméieren an ze benotzen, ënnerstëtzt SDK. Zousätzlech gëtt et Kollisiounserkennung ënnerstëtzt, dat heescht, hie géif automatesch stoppen wann e Mënsch beréiert gëtt, wat eng intelligent Mënsch-Maschinn-Zesummenaarbecht ass, an d'Sécherheet ass héich.
| Z-Arm 4160B Kollaborative Roboterarm | Parameteren |
| 1 Achs Aarmlängt | 325mm |
| 1 Achs Rotatiounswénkel | ±90° |
| 2-Achs Armlängt | 275mm |
| 2-Achs Rotatiounswénkel | ±164° Optional: 15-345° |
| Z-Achs-Héicht | 410 Héicht kann personaliséiert ginn |
| Rotatiounsberäich vun der R-Achs | ±1080° |
| Linear Geschwindegkeet | 2000 mm/s (Notzlaascht 4 kg) |
| Widderhuelbarkeet | ±0,02 mm |
| Standard-Notzlaascht | 4 kg |
| Maximal Notzlaascht | 5 kg |
| Grad vun der Fräiheet | 4 |
| Stroumversuergung | 220V/110V50-60HZ adaptéiert sech un 48VDC Spëtzeleistung 960W |
| Kommunikatioun | Ethernet |
| Expandabilitéit | Agebaute Bewegungscontroller bitt 24 I/O + Expansioun ënner der Äerm |
| Z-Achs kann an der Héicht personaliséiert ginn | 0,1m~0,8m |
| Z-Achs Schleppunterricht | / |
| Elektresch Schnittstell reservéiert | Standardkonfiguratioun: 24*23awg (ongeschiermt) Drot vum Steckdosenpanel duerch den ënneschten Aarmdeckel Optional: 2 φ4 Vakuumröhren duerch d'Steckdous an de Flansch |
| Kompatibel HITBOT elektresch Grëffer | Z-EFG-8S/Z-EFG-12/Z-EFG-20/Z-EFG-20S/Z-EFG-20F/Z-ERG-20C/Z-EFG-30/Z-EFG-50/Z-EFG-100 |
| Atmungsliicht | / |
| Bewegungsradius vum zweeten Aarm | Standard: ±164° Optional: 15-345° |
| Optional Accessoiren | / |
| Ëmwelt benotzen | Ëmgéigungstemperatur: 0-45°C Loftfiichtegkeet: 20-80%RH (kee Frascht) |
| I/O-Port digitalen Input (isoléiert) | 9+3+Ënneraarmverlängerung (optional) |
| I/O-Port digitalen Ausgang (isoléiert) | 9+3+Ënneraarmverlängerung (optional) |
| Analoge Input vun I/O-Port (4-20mA) | / |
| Analog Ausgang vun I/O-Port (4-20mA) | / |
| Héicht vum Roboterarm | 860mm |
| Gewiicht vum Roboterarm | Nettogewiicht vun 36,5 kg mat engem Hub vun 410 mm |
| Basisgréisst | 250mm * 250mm * 15mm |
| Distanz tëscht de Lächer fir d'Befestigung vun der Basis | 200mm*200mm mat véier M8*20 Schrauwen |
| Kollisiounserkennung | √ |
| Drag-Léier | √ |
Ideal Auswiel fir liicht Montageaufgaben
Den Z-Arm XX60B ass e 4-Achs Roboterarm mat enger grousser Aarmspann, deen eng kleng Fläch anhëlt, ganz gëeegent fir op enger Aarbechtsstatioun oder an enger Maschinn ze placéieren, et ass eng ideal Wiel fir liicht Montageaufgaben.


Liichtgewiicht mat groussem Rotatiounswénkel

D'Gewiicht vum Produkt ass ongeféier 36,5 kg, seng maximal Belaaschtung kann bis zu 5 kg sinn, de Rotatiounswénkel vun der 1-Achs ass ±90°, de Rotatiounswénkel vun der 2-Achs ass ±164°, de Rotatiounsberäich vun der R-Achs kann bis zu ±1080° sinn.
Grouss Aarmspann, breet Uwendung

Den Z-Arm XX60B huet eng laang Aarmspannwäit, d'Längt vun der 1-Achs ass 325 mm, d'Längt vun der 2-Achs ass 275 mm, seng linear Geschwindegkeet kann ënner enger Belaaschtung vu 4 kg bis zu 2000 mm/s sinn.


Flexibel ze installéieren, séier ze wiesselen
Den Z-Arm XX60B huet d'Charakteristike vu Liichtgewiicht, Platzspuerend a Flexibilitéit beim Asaz, e kann a ville Uwendungen agesat ginn, an et géif näischt un der fréierer Produktiounsstruktur änneren, dorënner de schnelle Wiessel vun der Prozesssequenz a komplette Produktioun a klenge Chargen, etc.
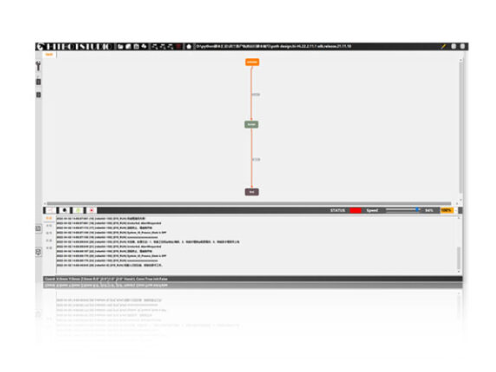
DragTeaching fir de Programm ofzeschléissen

D'Software baséiert op Grafikdesign a bitt Punktmoduler, Ausgangssignalmoduler, elektresche Grëffer, Tablettmoduler, Verzögerungsmoduler, Subprozessmoduler, Resetmoduler an aner Basisfunktiounsmoduler un. D'Benotzer kënnen de Modul zéien fir de Roboterarm am Programméierungsberäich ze steieren. D'Interface ass einfach, awer d'Funktioun ass mächteg.
Bewegungsbereich M1 Versioun (no baussen dréien)
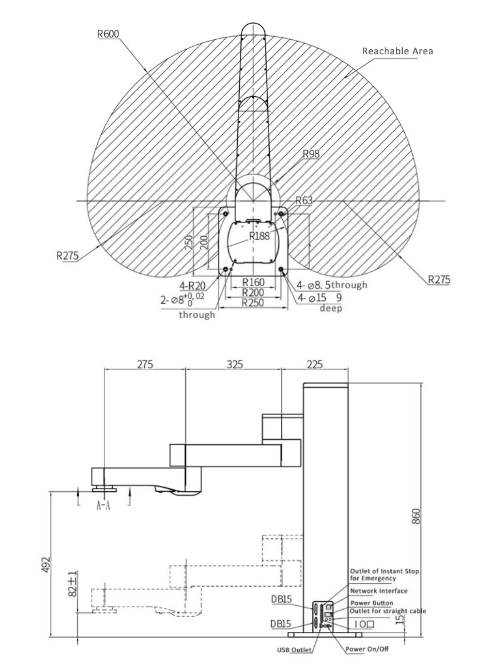
Empfehlung fir den DB15-Connector

Recommandéiert Modell: Vergoldete Stecker mat ABS-Schuel YL-SCD-15M Vergoldete Weiblech mat ABS-Schuel YL-SCD-15F
Gréisst Beschreiwung: 55mm * 43mm * 16mm
(Kuckt op Figur 5)
Diagramm vun der externer Benotzungsëmfeld vum Roboterarm

Eis Entreprise






