SCHNELLWIESSELSERIE – QCA-S150 E Schnellwechselgerät um Enn vun engem Roboter


Haaptkategorie
Roboter-Werkzeugwechsler / End-of-Aarm-Werkzeugwechsler (EOAT) / Schnellwechselsystem / Automatischen Werkzeugwechsler / Roboter-Werkzeugschnittstell / Roboterseite / Grëffseite / Werkzeugflexibilitéit / Schnellspannung / Pneumatischen Werkzeugwechsler / Elektrischen Werkzeugwechsler / Hydraulische Werkzeugwechsler / Präzisionswerkzeugwechsler / Sécherheetsverriegelungsmechanismus / Endeffektor / Automatiséierung / Werkzeugwechseleffizienz / Werkzeugsaustausch / Industriell Automatiséierung / Roboter-End-of-Aarm-Werkzeug / Modularer Design
Applikatioun
End-of-Arm Tooling (EOAT) gëtt wäit verbreet an Industrien ewéi der Automobilindustrie, 3C Elektronik, Logistik, Sprëtzguss, Liewensmëttel- a Pharmazeutesch Verpackung, a Metallveraarbechtung benotzt. Zu senge Haaptfunktioune gehéieren d'Handhabung vu Werkstécker, Schweessen, Sprëtzen, Inspektioun a séier Werkzeugwiessel. EOAT verbessert d'Produktiounseffizienz, d'Flexibilitéit an d'Produktqualitéit däitlech, wouduerch et zu engem essentiellen Deel vun der moderner industrieller Automatiséierung ass.
Fonktioun
Héichpräzis
D'Greifsäit vum Kolbenjustierer spillt d'Roll vun der Positionéierung, wat eng héich Widderhuelungsgenauegkeet vun der Positionéierung garantéiert. Eng Millioun Zykltester weisen datt déi tatsächlech Genauegkeet vill méi héich ass wéi de recommandéierte Wäert.
Héich Stäerkt
De Sperrkolben mat engem groussen Zylinderduerchmiesser huet eng staark Sperrkraaft, an den SCIC Roboter-End-Schnellvorrichtung huet eng staark Anti-Dréimoment-Fäegkeet. Beim Sperren gëtt et kee Wackelen duerch héichgeschwindeg Bewegung, sou datt e Sperrversoen vermeit gëtt an d'Widderhuelungsgenauegkeet vun der Positionéierung garantéiert gëtt.
Héich Leeschtung
De Verriegelungsmechanismus mat multikonischem Uewerflächendesign, laanglieweg Dichtungskomponenten an eng héichqualitativ elastesch Kontaktsonde ginn adoptéiert fir den enke Kontakt vum Signalmodul ze garantéieren.



Spezifikatiounsparameter
| Quick Changer Serie | ||||
| Modell | Maximal Notzlaascht | Gaswee | Sperrkraaft @ 80 Psi (5,5 Bar) | Produktgewiicht |
| QCA-05 | 5 kg | 6-M5 | 620N | 0,4 kg |
| QCA-05 | 5 kg | 6-M5 | 620N | 0,3 kg |
| QCA-15 | 15 kg | 6-M5 | 1150N | 0,3 kg |
| QCA-25 | 25 kg | 12-M5 | 2400N | 1,0 kg |
| QCA-35 | 35 kg | 8-G1/8 | 2900N | 1,4 kg |
| QCA-50 | 50 kg | 9-G1/8 | 4600N | 1,7 kg |
| QCA-S50 | 50 kg | 8-G1/8 | 5650N | 1,9 kg |
| QCA-100 | 100 kg | 7-G3/8 | 12000N | 5,2 kg |
| QCA-S100 | 100 kg | 5-G3/8 | 12000N | 3,7 kg |
| QCA-S150 | 150 kg | 8-G3/8 | 12000N | 6,2 kg |
| QCA-200 | 300 kg | 12-G3/8 | 16000N | 9,0 kg |
| QCA-200D1 | 300 kg | 8-G3/8 | 16000N | 9,0 kg |
| QCA-S350 | 350 kg | / | 31000N | 9,4 kg |
| QCA-S500 | 500 kg | / | 37800N | 23,4 kg |

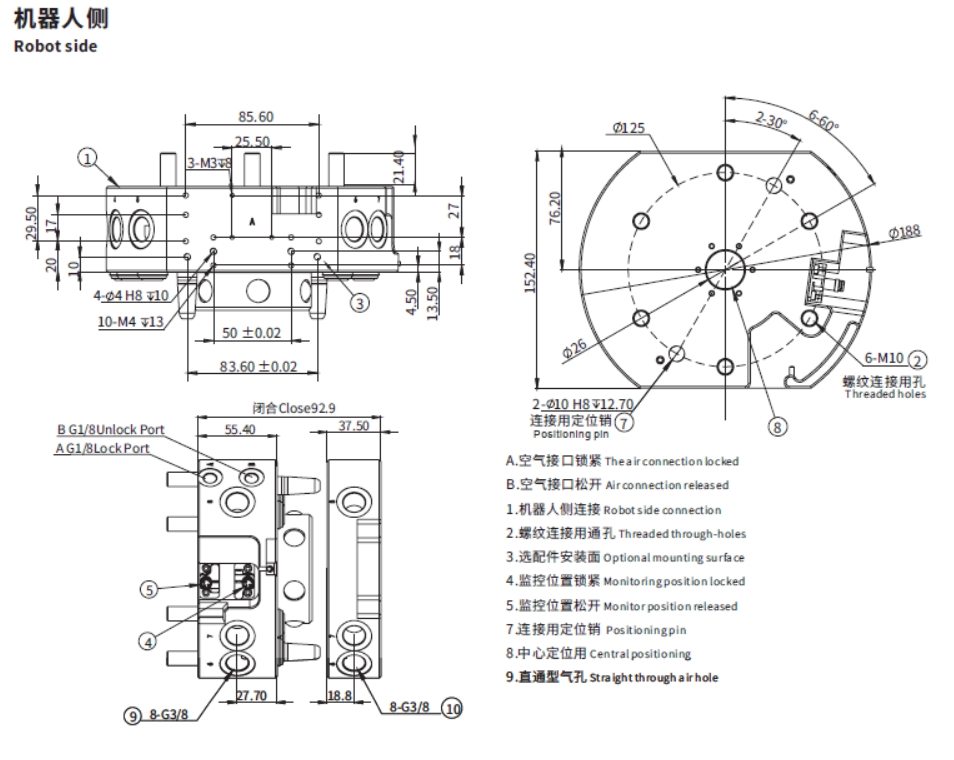
Roboter Säit
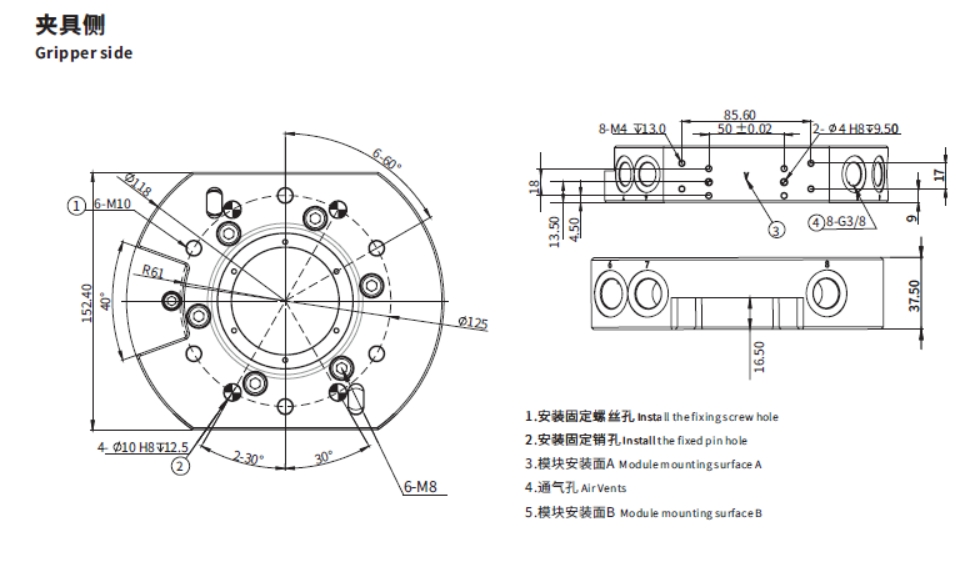
Grëffer Säit
Uwendbar Modul
Modultyp
| Produktnumm | Modell | PN | Aarbechtsspannung | Aarbechtsstroum | Stecker | Stecker PN |
| Roboter Säit Signalmodul | QCSM-15R2 | 7.Y00468 | 24V | 2,5A | D-Sub15R2-1000① | 1.Y10080 |
| Gripper Säit Signalmodul | QCSM-15G2 | 7.Y00469 | 24V | 2,5A | D-Sub15G2-1000① | 1.Y10081 |
| Roboter Säit Signalmodul | QCSM-08R | 7.Y00477 | 380V | 30A | 3108A22-23S② | 1.Y10710 |
| Gripper Säit Signalmodul | QCSM-08G | 7.Y00478 | 380V | 30A | 3108A22-23P② | 1.Y10711 |
| Roboter Säit Signalmodul | QCSM-19R | 7.Y00954 | 220V | 3A | MS3116F14-19S/-Y② | 1.Y11420 |
| Roboter Säit Signalmodul | QCSM-19R | 7.Y00954 | 220V | 3A | CMB08E-14-19S(072)SR-B② | 1.Y11863 |
| Roboter Säit Signalmodul | QCSM-19R1 | 7.Y02123 | 220V | 3A | MS3116F14-19S/-Y② | 1.Y11420 |
| Roboter Säit Signalmodul | QCSM-19R1 | 7.Y02123 | 220V | 3A | CMB08E-14-19S(072)SR-B② | 1.Y11863 |
| Gripper Säit Signalmodul | QCSM-19G | 7.Y00955 | 220V | 3A | MS3116F14-19P/-Y② | 1.Y11419 |
| Gripper Säit Signalmodul | QCSM-19G | 7.Y00955 | 220V | 3A | CMB08E-14-19P(072)SR-B② | 1.Y11864 |
| Roboter Säit Signalmodul | QCSM-26R | 7.Y00464 | 220V | 3A | MS3116F16-26S/-Y② | 1.Y11867 |
| Roboter Säit Signalmodul | QCSM-26R | 7.Y00464 | 220V | 3A | CMB08E-16-26S(072)SR-B② | 1.Y11865 |
| Gripper Säit Signalmodul | QCSM-26G | 7.Y00465 | 220V | 3A | MS3116F16-26P/-Y② | 1.Y11369 |
| Gripper Säit Signalmodul | QCSM-26G | 7.Y00465 | 220V | 3A | CMB08E-16-26P(072)SR-B② | 1.Y11866 |
| Gripper Säit Signalmodul | QCSM-21/26G | 7.Y02117 | 220V | 3A | MS3116F16-26P/-Y② | 1.Y11369 |
| Gripper Säit Signalmodul | QCSM-21/26G | 7.Y02117 | 220V | 3A | CMB08E-16-26P(072)SR-B② | 1.Y11866 |
| Roboter Säit Signalmodul | QCSM-32R | 7.Y02095 | 220V | 3A | MS3116F22-36S② | 1.Y13392 |
| Roboter Säit Signalmodul | QCSM-32R | 7.Y02095 | 220V | 3A | MS3118F22-36S② | 1.Y13393 |
| Gripper Säit Signalmodul | QCSM-32G | 7.Y02096 | 220V | 3A | MS3116F22-36P② | 1.Y13394 |
| Gripper Säit Signalmodul | QCSM-32G | 7.Y02096 | 220V | 3A | MS3118F22-36P② | 1.Y13395 |
①D'Längt vum Kabel ass 1 Meter ②Nëmme Verbindung, kee Drot
Pneumateschen Erweiterungsmodul
| Produktnumm | Modell | PN | Gasswee | Gewindelach |
| Robotersäiteg pneumatesch Verlängerungsmodul | QCAM-06G18R | 7.Y01015 | 6 | G1/8 |
| Grëffsäit Pneumatesch Verlängerungsmodul | QCAM-06G18G | 7.Y01016 | 6 | G1/8 |
| Robotersäiteg pneumatesch Verlängerungsmodul | QCAM-06G18R-E | 7.Y01018 | 6 | G1/8 |
| Grëffsäit Pneumatesch Verlängerungsmodul | QCAM-06G18G-E | 7.Y01019 | 6 | G1/8 |
| Robotersäiteg pneumatesch Verlängerungsmodul | QCAM-10M5R | 7.Y01053 | 10 | M5 |
| Grëffsäit Pneumatesch Verlängerungsmodul | QCAM-10M5G | 7.Y01054 | 10 | M5 |
| Robotersäiteg pneumatesch Verlängerungsmodul | QCAM-14M5R | 7.Y01055 | 14 | M5 |
| Grëffsäit Pneumatesch Verlängerungsmodul | QCAM-14M5G | 7.Y01056 | 14 | M5 |
| Robotersäit selbsternannt pneumatesch Verlängerungsmodul | QCAM-06G18R-F | 7.Y02005 | 6 | G1/8 |
| Griffersäit selbsternannt pneumatesch Verlängerungsmodul | QCAM-06G18G-F | 7.Y02006 | 6 | G1/8 |
| Robotersäiteg pneumatesch Verlängerungsmodul | QCAM-04G38R | 7.Y02043 | 4 | G3/8 |
| Grëffsäit Pneumatesch Verlängerungsmodul | QCAM-04G38G | 7.Y02044 | 4 | G3/8 |
Typ vun Héichfrequenzmodul
| Produktnumm | Modell | PN | Aarbechtsspannung | Aarbechtsstroum |
| Roboter Säit Signalmodul | QCHFM-E14-C1R | 7.Y02003 | 1,4 kV | 5A |
| Griffersäit Signalmodul | QCHFM-E14-C1G | 7.Y02004 | 1,4 kV | 5A |
Signalmodul (Netzkabel-Interface)
| Produktnumm | Modell | PN |
| Roboter Säit Signalmodul | QCSM-RJ45-06R | 7.Y02007 |
| Gripper Säit Signalmodul | QCSM-RJ45-06G | 7.Y02008 |
Servo-Leeschtungsmodul
| Produktnumm | Modell | PN |
| Roboter Säit Servo Power Modul | QCSM-08R1 | 7.Y02080 |
| Grëffer-Säit Servo-Leeschtungsmodul | QCSM-08G1 | 7.Y02081 |
Servo-Signalmodul
| Produktnumm | Modell | PN |
| Roboter Säit Servo Signal Modul | QCSM-12R | 7.Y02082 |
| Griffersäit Servosignalmodul | QCSM-12G | 7.Y02083 |
Selbstdichtend Flëssegkeetsloftmodul
| Produktnumm | Modell | PN |
| Roboter Säit Signalmodul | QCWM-02R | 7.Y02049 |
| Gripper Säit Signalmodul | QCWM-02G | 7.Y02050 |
Eis Entreprise







